Autonomous NBA Shot-Tracking Engine
Building a physics-based engine to detect bucket getting.
Table of Contents
Introduction: The Problem
The core question: Was there a made basket in this NBA clip?
In Machine Learning terms, this is a Binary Classification problem (Yes/No). Standard approaches might try to retrain a generic model (like ResNet) to "look" for a made basket by feeding it tons of video data. But that is computationally expensive and prone to overfitting.
If we want to be smarter, we need to decompose the problem.
Initial Assumption
Let's define what a made basket is based on physics: A made basket is when the basketball goes from above the ring of a net and goes through it.
This changes our task. We don't need Binary Classification; we need Object Detection. We need to figure out:
- What a Basketball looks like (identify its coordinates).
- What a Basketball Net looks like (identify its coordinates).
I sourced a standard YOLOv11n model and datasets from Roboflow. I had to tune the confidence levels carefully based on the F1 Scores.
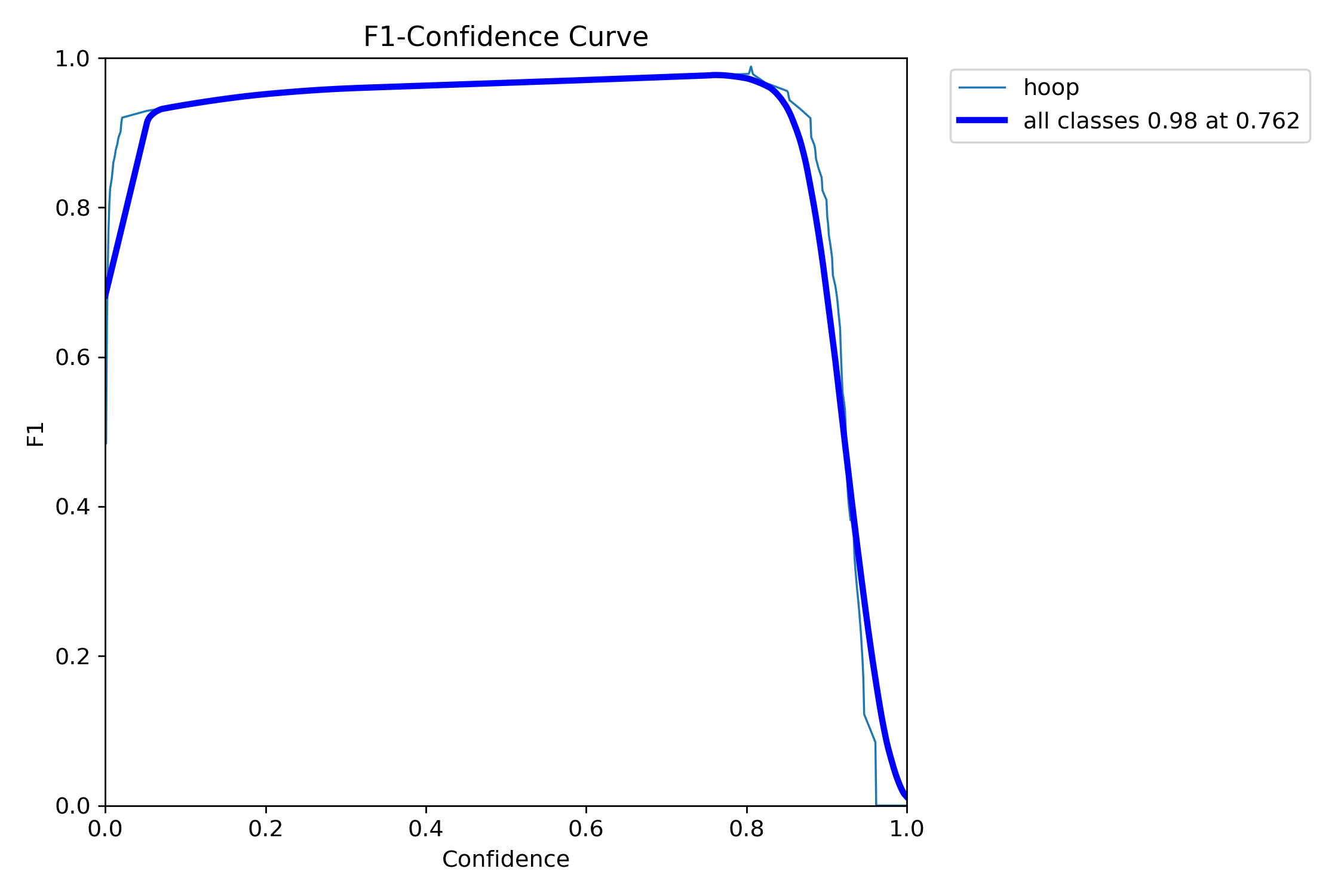
FIG 1.1: RIM F1 SCORE
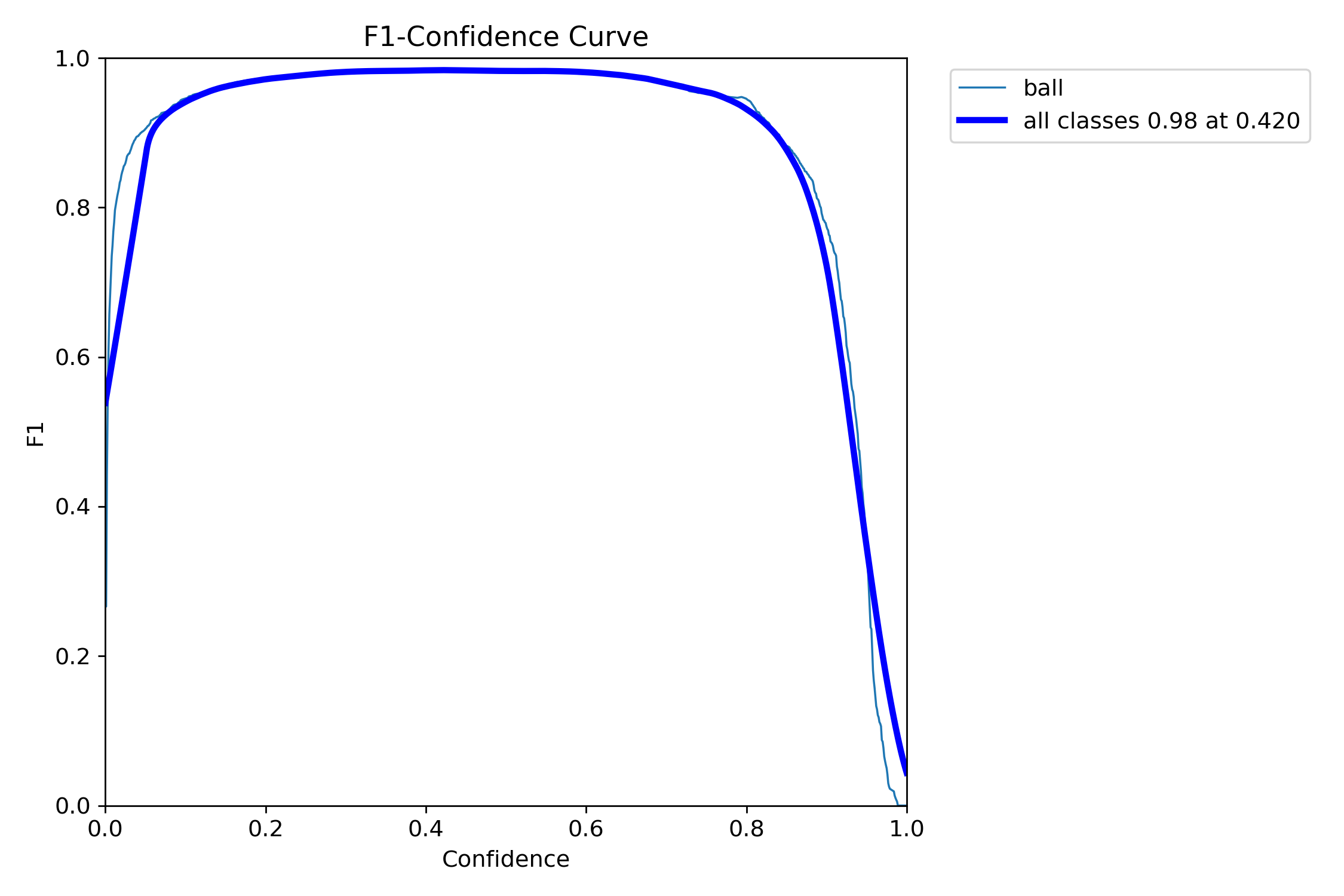
FIG 1.2: BALL F1 SCORE
from ultralytics import YOLO
def train_local():
# 1. Load the SOTA Model (YOLOv11 Nano)
# It will download automatically if you don't have it
model = YOLO('yolo11n.pt')
# 2. Train on your LOCAL dataset
# Point 'data' to your edited data.yaml file
print("Starting Local Training...")
results = model.train(
data='data.yaml', # Assumes data.yaml is in the same folder
epochs=50, # 50 epochs is plenty for a single class
imgsz=640,
batch=16,
name='nba_hoop_v11',
device=0 # Set to 'cpu' if you don't have a GPU
)
print(f"Success! Weights saved at: runs/detect/nba_hoop_v11/weights/best.pt")
if __name__ == "__main__":
train_local()
The Failure Loop
I applied this first dataset, but it failed immediately. The basketball detection wasn't working due to motion blur, although the rim was okay.
I switched to another dataset, but it still struggled.
I tried a third dataset. It became clear that the differences in camera angles, court colors, and lighting were breaking the model.
The Pivot: Data Mining
I needed a better way to get data. I built a custom Data Miner to scrape specific "hard negatives" from my video files.
import cv2
import os
import numpy as np
# --- CONFIG ---
VIDEO_PATH = 'jaquez_fadeaway_make_1.mp4' # CHANGE THIS to your video file
OUTPUT_DIR = 'nba_smart_data'
CLASS_ID = 0 # 0 for Ball (since we are training a single-class model)
# Setup Folders
img_dir = os.path.join(OUTPUT_DIR, "images")
lbl_dir = os.path.join(OUTPUT_DIR, "labels")
os.makedirs(img_dir, exist_ok=True)
os.makedirs(lbl_dir, exist_ok=True)
# Global Variables
drawing = False
ix, iy = -1, -1
bbox = None # (x1, y1, x2, y2)
current_frame_idx = 0
cap = cv2.VideoCapture(VIDEO_PATH)
total_frames = int(cap.get(cv2.CAP_PROP_FRAME_COUNT))
def on_trackbar(val):
global current_frame_idx, bbox
current_frame_idx = val
cap.set(cv2.CAP_PROP_POS_FRAMES, current_frame_idx)
bbox = None # Reset box when moving frames
def draw_rect(event, x, y, flags, param):
global ix, iy, drawing, bbox
if event == cv2.EVENT_LBUTTONDOWN:
drawing = True
ix, iy = x, y
bbox = None
elif event == cv2.EVENT_MOUSEMOVE:
if drawing:
# Update temporary box for visualization
bbox = (ix, iy, x, y)
elif event == cv2.EVENT_LBUTTONUP:
drawing = False
# Finalize box (handle dragging backwards)
x1, y1 = min(ix, x), min(iy, y)
x2, y2 = max(ix, x), max(iy, y)
bbox = (x1, y1, x2, y2)
def save_yolo_format(frame, box, frame_num):
# 1. Save Image
filename = f"ball_fix_{frame_num}"
img_path = os.path.join(img_dir, f"{filename}.jpg")
cv2.imwrite(img_path, frame)
# 2. Convert Box to YOLO (Normalized xywh)
h, w, _ = frame.shape
x1, y1, x2, y2 = box
# Clip to image bounds
x1, x2 = max(0, x1), min(w, x2)
y1, y2 = max(0, y1), min(h, y2)
# Math: Center X, Center Y, Width, Height (Normalized 0-1)
bw = x2 - x1
bh = y2 - y1
cx = x1 + (bw / 2)
cy = y1 + (bh / 2)
norm_cx = cx / w
norm_cy = cy / h
norm_w = bw / w
norm_h = bh / h
# 3. Save Label
txt_path = os.path.join(lbl_dir, f"{filename}.txt")
with open(txt_path, 'w') as f:
f.write(f"{CLASS_ID} {norm_cx:.6f} {norm_cy:.6f} {norm_w:.6f} {norm_h:.6f}")
print(f"[SAVED] {filename} | Box: {x1},{y1},{x2},{y2}")
# --- MAIN LOOP ---
cv2.namedWindow('Smart Miner')
cv2.createTrackbar('Frame', 'Smart Miner', 0, total_frames-1, on_trackbar)
cv2.setMouseCallback('Smart Miner', draw_rect)
print("--- SMART MINER CONTROLS ---")
print("MOUSE: Click & Drag to draw box")
print("SPACE: Play / Pause")
print("A / D: Prev / Next Frame (Precise)")
print("S: SAVE current frame + box")
print("Q: Quit")
print("-" * 30)
paused = True # START STOPPED
while True:
if not paused:
ret, frame = cap.read()
if ret:
current_frame_idx = int(cap.get(cv2.CAP_PROP_POS_FRAMES))
cv2.setTrackbarPos('Frame', 'Smart Miner', current_frame_idx)
bbox = None # Clear box on play
else:
paused = True # Stop at end
else:
# If paused, keep reading the SAME frame so we can draw on it
cap.set(cv2.CAP_PROP_POS_FRAMES, current_frame_idx)
ret, frame = cap.read()
if not ret: break
if frame is None: break
display_frame = frame.copy()
# Draw the box if it exists
if bbox:
x1, y1, x2, y2 = bbox
cv2.rectangle(display_frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(display_frame, "READY TO SAVE (Press S)", (x1, y1-10),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 255, 0), 2)
# Status Overlay
status = "PAUSED" if paused else "PLAYING"
cv2.putText(display_frame, f"Status: {status} | Frame: {current_frame_idx}", (20, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)
cv2.imshow('Smart Miner', display_frame)
# KEYS
key = cv2.waitKey(10) & 0xFF
if key == ord('q'):
break
elif key == ord(' '):
paused = not paused
elif key == ord('d'): # Next Frame
paused = True
current_frame_idx = min(current_frame_idx + 1, total_frames - 1)
cv2.setTrackbarPos('Frame', 'Smart Miner', current_frame_idx)
bbox = None
elif key == ord('a'): # Prev Frame
paused = True
current_frame_idx = max(current_frame_idx - 1, 0)
cv2.setTrackbarPos('Frame', 'Smart Miner', current_frame_idx)
bbox = None
elif key == ord('s'): # SAVE
if bbox:
save_yolo_format(frame, bbox, current_frame_idx)
# Visual Flash
cv2.rectangle(display_frame, (0,0), (display_frame.shape[1], display_frame.shape[0]), (255,255,255), -1)
cv2.imshow('Smart Miner', display_frame)
cv2.waitKey(50)
bbox = None # Reset after save
else:
print("⚠️ No box drawn! Cannot save.")
cap.release()
cv2.destroyAllWindows()
This fixed the ball, but now the rim was flickering (Fail 4) due to camera pans. So I quickly built a miner for the rim and retrained again.
The Logic: Red & Green
With stable detection, I implemented the scoring logic. We identify the top of the rim (Red) and the bottom (Green). If the ball doesn't go through the Red zone, it is not a made basket.
This logic worked for a wide variety of shots:
The Parallax Bug
However, this resulted in a critical failure: Fail 6. A "floater" missed the rim entirely but fell behind the net. Due to the camera angle (parallax), it passed through the Red Zone and looked like a make.
The Strict Gate
We accounted for this by adding a Narrow Gate underneath the rim. The ball must exit through this tiny hole to count.
This successfully rejected the floater (Success 6), but it created a new problem (Fail 7). When the ball swished too hard, it pushed the net backward, missing the narrow gate. We had solved the False Positive but created a False Negative.
Final Production: High & Tight
Finally, we moved the gate taller (up to the neck of the net). This way, even hard swishes pass through the gate before the net deforms.
import streamlit as st
import cv2
import tempfile
import os
import numpy as np
from collections import deque
from ultralytics import YOLO
st.set_page_config(page_title="NBA Vision (Final)", layout="wide", page_icon="🏀")
st.title("🏀 NBA Vision: Production Candidate")
# --- 1. UTILS ---
class RimMemory:
def __init__(self):
self.last_rim = None
self.frames_without_rim = 0
def update(self, raw_rim):
if raw_rim is not None:
self.last_rim = raw_rim
self.frames_without_rim = 0
return raw_rim
elif self.last_rim is not None and self.frames_without_rim < 60:
self.frames_without_rim += 1
return self.last_rim
return None
# --- GRAVITY KILLER (DUMB SMOOTHER) ---
class DumbSmoother:
def __init__(self, history_size=3):
self.history = deque(maxlen=history_size)
def update(self, raw_box, rim_box=None):
if raw_box is not None:
self.history.append(raw_box)
return np.mean(self.history, axis=0).astype(int).tolist()
return None
# --- 2. SHOT DETECTOR (HIGH & TIGHT) ---
class ShotDetector:
def __init__(self):
self.basket_made = False
self.shot_in_progress = False
self.cooldown = 0
def update(self, ball_box, rim_box):
# Allow multiple shots in a clip (with cooldown) or stick to binary?
# Sticking to binary "Did a Make Happen?" for this demo
if self.basket_made: return True
if ball_box is None or rim_box is None: return False
bx, by, bw, bh = ball_box
rx, ry, rw, rh = rim_box
ball_cy = int(by + bh // 2)
ball_cx = int(bx + bw // 2)
rim_center_x = int(rx + rw // 2)
# --- ZONES (Hidden Logic) ---
# 1. ENTRY (Wide): 50% width
entry_width = int(rw * 0.5)
ex1 = int(rim_center_x - entry_width // 2)
ex2 = int(rim_center_x + entry_width // 2)
entry_y = ry
# 2. EXIT (High & Tight): 25% width at 50% depth
exit_width = int(rw * 0.25)
fx1 = int(rim_center_x - exit_width // 2)
fx2 = int(rim_center_x + exit_width // 2)
finish_line_y = ry + int(rh * 0.50)
# --- LOGIC ---
# A. DETECT ENTRY
if (ex1 < ball_cx < ex2) and (entry_y < ball_cy < entry_y + rh*0.4):
self.shot_in_progress = True
# B. DETECT FINISH
if self.shot_in_progress:
if ball_cy > finish_line_y:
# CHECK: Is it centered in the narrow neck?
if (fx1 < ball_cx < fx2):
self.basket_made = True
self.shot_in_progress = False
return True
else:
# REJECTED: Ball drifted wide (Parallax/Floater Miss)
self.shot_in_progress = False
# C. ABORT (Popped up)
if ball_cy < ry:
self.shot_in_progress = False
return False
# --- 3. LOAD MODELS ---
@st.cache_resource
def load_models():
# Use the best weights
ball_path = 'runs/detect/ball_model_blur_fix/weights/best.pt'
hoop_path = 'runs/detect/nba_hoop_custom_v1/weights/best.pt'
ball_model = YOLO(ball_path) if os.path.exists(ball_path) else YOLO('yolo11n.pt')
hoop_model = YOLO(hoop_path) if os.path.exists(hoop_path) else YOLO('yolo11n.pt')
return ball_model, hoop_model
ball_model, hoop_model = load_models()
# --- MAIN UI ---
st.sidebar.header("Configuration")
ball_conf = st.sidebar.slider("Ball Confidence", 0.1, 0.9, 0.25)
hoop_conf = st.sidebar.slider("Hoop Confidence", 0.3, 0.9, 0.5)
uploaded_file = st.file_uploader("Upload Clip", type=["mp4", "mov"])
if uploaded_file is not None:
tfile = tempfile.NamedTemporaryFile(delete=False, suffix='.mp4')
tfile.write(uploaded_file.read())
cap = cv2.VideoCapture(tfile.name)
width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(cap.get(cv2.CAP_PROP_FPS))
total_frames = int(cap.get(cv2.CAP_PROP_FRAME_COUNT))
# OUTPUT
output_path = tempfile.NamedTemporaryFile(delete=False, suffix='.mp4').name
try: fourcc = cv2.VideoWriter_fourcc(*'avc1')
except: fourcc = cv2.VideoWriter_fourcc(*'mp4v')
out = cv2.VideoWriter(output_path, fourcc, fps, (width, height))
progress_bar = st.progress(0)
frame_cnt = 0
rim_memory = RimMemory()
smoother = DumbSmoother() # NO GRAVITY
scorer = ShotDetector()
while cap.isOpened():
ret, frame = cap.read()
if not ret: break
# 1. AI
raw_ball, raw_rim = None, None
b_res = ball_model.track(frame, persist=True, verbose=False, conf=ball_conf)
if b_res[0].boxes:
b = b_res[0].boxes[0].xywh.cpu().numpy()[0]
raw_ball = [b[0], b[1], b[2], b[3]]
r_res = hoop_model(frame, verbose=False, conf=hoop_conf)
if r_res[0].boxes:
r = r_res[0].boxes[0].xywh.cpu().numpy()[0]
raw_rim = [r[0]-r[2]/2, r[1]-r[3]/2, r[2], r[3]]
# 2. PHYSICS
stable_rim = rim_memory.update(raw_rim)
final_ball = smoother.update(raw_ball)
# 3. LOGIC
ball_box_score = None
if final_ball:
bx, by, bw, bh = final_ball
ball_box_score = [int(bx-bw/2), int(by-bh/2), int(bw), int(bh)]
scorer.update(ball_box_score, stable_rim)
# 4. DRAW
# Draw Rim (Clean Green)
if stable_rim:
rx, ry, rw, rh = map(int, stable_rim)
cv2.rectangle(frame, (rx, ry), (rx+rw, ry+rh), (0, 255, 0), 2)
cv2.putText(frame, "RIM", (rx, ry-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# Draw Ball (Clean Yellow)
if ball_box_score:
x, y, w, h = ball_box_score
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 255), 2)
cv2.putText(frame, "BASKETBALL", (x, y-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 255), 2)
# Draw Status
if scorer.basket_made:
# Flash Green Border
cv2.rectangle(frame, (0,0), (width, height), (0, 255, 0), 10)
# Center Text
cv2.putText(frame, "BASKET!", (width//2 - 100, 100), cv2.FONT_HERSHEY_SIMPLEX, 2, (0, 255, 0), 4)
out.write(frame)
frame_cnt += 1
progress_bar.progress(min(frame_cnt / total_frames, 1.0))
cap.release()
out.release()
progress_bar.empty()
result = 1 if scorer.basket_made else 0
if result == 1:
st.success(f"### Made Basket: {result}")
else:
st.error(f"### Made Basket: {result}")
with open(output_path, 'rb') as f:
st.video(f.read())
This fixed the swish (Success 7). We checked back with the floater, and it still correctly rejected it (Success 8).
TL;DR
- > PROBLEM: Binary Classification was too expensive/brittle.
- > SOLUTION: Object Detection + Physics Logic.
- > FAILURES: Generic datasets failed on angles/colors.
- > PIVOT: Built custom Active Learning Miner.
- > FINAL LOGIC: "High & Tight" Gate (50% depth, 25% width).